
Team Scuderia Segfault from TU Wien again shows great performance at the 24th RoboRacer Autonomous Grand Prix, held from May 19th to 23rd as part of the IEEE Conference on Robotics and Automation (ICRA 2025) in Atlanta, United States. Out of 25 teams, Scuderia Segfault was able to deliver the most reliable run at the time-trials, without a single crash.
Race preparations
In the weeks leading up to the event, our team engaged in thorough preparation for the race. Drawing on experience from previous international competitions, they had gained valuable insights into what it takes to perform optimally, even under pressure and in difficult conditions. They not only enhanced the racing algorithm and upgraded the vehicle hardware to keep pace with the latest technological developments, but also refined and optimized the race-line generation methodology.
Additionally, they created a structured plan to manage all on-site race activities – from the initial identification of friction parameters and the mapping process to the intense head-to-head races that demand quick decision-making. To ensure smooth execution, the team conducted realistic drills in the weeks prior to the event to become thoroughly familiar with the established protocols.
Arriving in Atlanta and getting ready to race
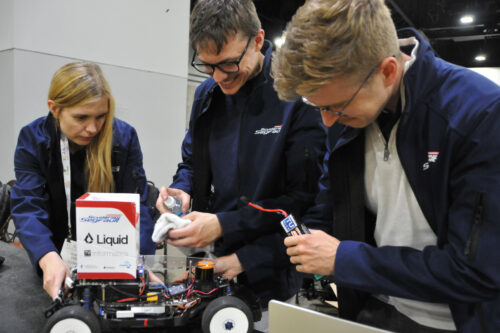
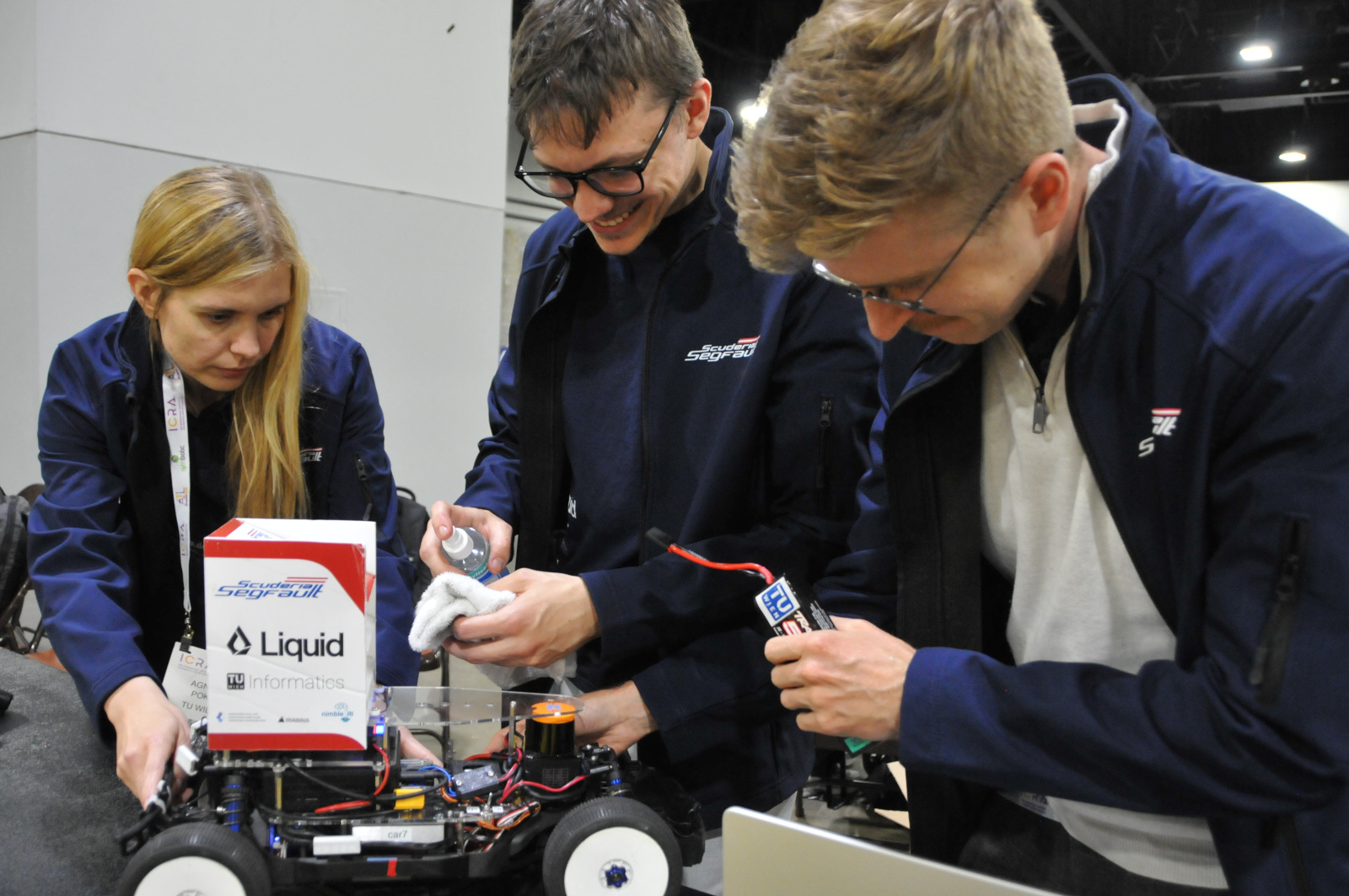
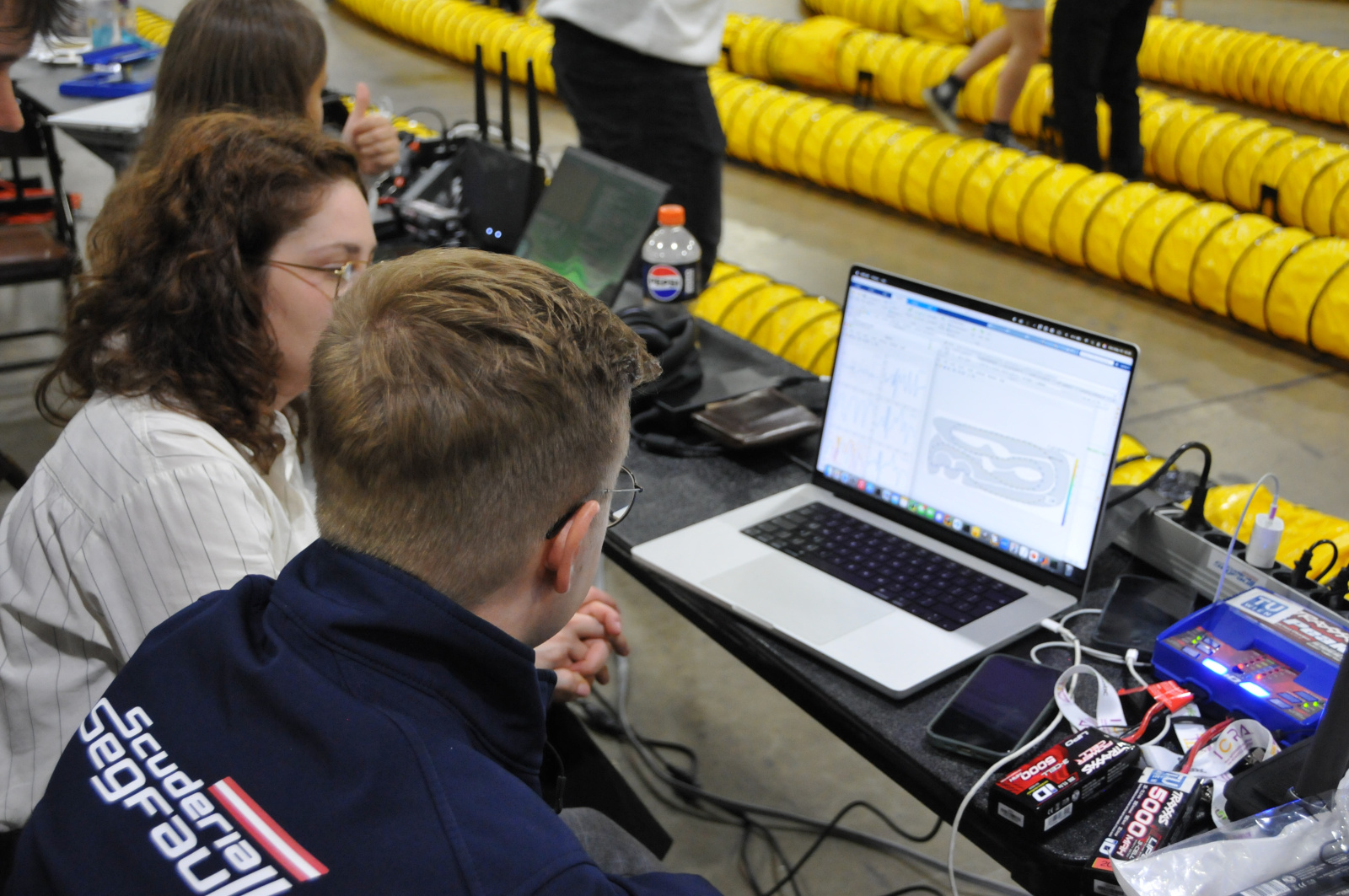
When the team arrived in Atlanta, they first made sure that all hardware was still in good condition after the international transport and conducted a thorough check on all components. At the race-track, there was already the first challenge, as the track was significantly larger and the layout considerably more difficult than ever before. However, our race line optimization experts on our team invested full effort to generate an optimal solution and get the car on the right path. Challenging turns were iteratively optimized until there was an optimized race line without any collisions and crashes. The following days were then dedicated to improving the speed and getting faster laps.
The most reliable car in time-trials
After the testing sessions, the race started with the time-trials, where the autonomous cars needed to show speed and reliability: The fastest lap, as well as the number of laps without crashes, are both recorded and determine the ranking for the following races against other cars. Especially the number of laps is relevant for the reliability of the car, showcasing thorough engineering and development. In the first out of two heats, our team scored six laps with a lap time of 20.25 seconds. This was due to some spurious crashes and not yet fully tuned controller parameters. However, this lap time would have already placed our team in the top five on this ranking. Our team did not content itself with this result and worked hard in the limited remaining testing time on improving both speed and consistency of the car. Race-lines were further optimized, controller parameters carefully adjusted, and every hardware component carefully checked. This investment totally paid off, as in the second heat, the top lap time could be pushed to incredible 19.68 seconds, resulting in the second-fastest team overall. Even more outstanding was the performance with respect to reliability: The car was driving continuously throughout the whole heat without a single collision, scoring excellent 30 rounds. This makes our team the absolute best in this metric, showcasing a very consistent performance!
Head-to-Head Tournament
On the following day, it was all about head-to-head races, where two autonomous cars race for the win in a double elimination bracket. The first race of our team was against Penn McQueen from the University of Pennsylvania, with a clear win for Scuderia Segfault, after completing 20 laps. Next up was the pairing against UCF-CAVREL from the University of Central Florida. Our car had some spurious faults, setting the win on the stake. However, our team reacted without panic and quickly fixed the issues, which also led to a victory in this race. In the next round, there was a new edition of an all-time classic in Roboracer competitions: Scuderia Segfault against ForzaETH from ETH Zürich. As both teams had shown similar performance in the races so far, it was again a thrilling competition. The decision was close to some meters and even less, when ETH once crashed into the barrier, giving an advantage to Scuderia Segfault. But then another collision happened, and ETH overtook again and won this race. This placed our team in the B-bracket, resulting in the next race against VAUL from Laval University. VAUL delivered excellent performance in one of the last races of 2024 in Japan, but this time, Scuderia Segfault was able to beat them clearly, advancing to the semi-final. The last race was against UNICORN from Ulsan National Institute of Science & Technology (UNIST), which resulted in the overall fourth place for team Scuderia Segfault.
About the team
Scuderia Segfault is TU Wien Informatics’ team for research on autonomous cars and autonomous racing in the RoboRacer series, consisting of Felix Resch, Moritz Christamentl, Agnes Poks, Elisa Di Cristo, Larisa Clement, Mihai-Teodor Stanusoiu, Monika Farsang, Philipp Gratzer, Piet Kaul, Samuel Lechner, under the supervision of PostDoc Researcher Andreas Brandstätter and Professor Radu Grosu from the Research Unit for Cyber-Physical Systems. A part of the team traveled to Atlanta to participate in the race; others contributed to preparation and development beforehand and online remote support during the race.
Thanks to our supporting partners
Our team is very grateful for the generous support from Liquid AI. Some team members are supported by project NimbleAI. The team was further supported by HTU and Magna International.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}